
RTK道路设计方法--交叉点法详解
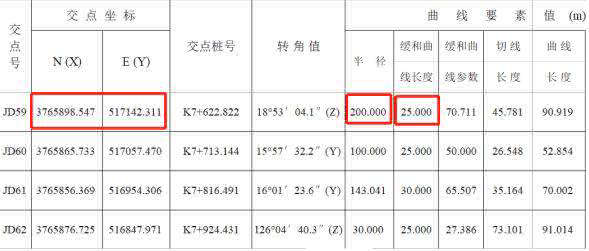
关于普通交叉点,只需要提供"交叉点名称"、"交叉点坐标"、"第一缓和曲线长度"、"圆曲线半径"、"第二缓和曲线长度"这五个要素,并在设置中输入"起始里程"和"里程间隔"即可。
关于普通交叉点,只需要提供"交叉点名称"、"交叉点坐标"、"第一缓和曲线长度"、"圆曲线半径"、"第二缓和曲线长度"这五个要素,并在设置中输入"起始里程"和"里程间隔"即可。
对于复杂的交叉点,比如存在不完全缓和曲线、虚交点,不完全缓和曲线需要输入第一缓和曲线起始半径或者第二缓和曲线终点半径。
案例:平曲线
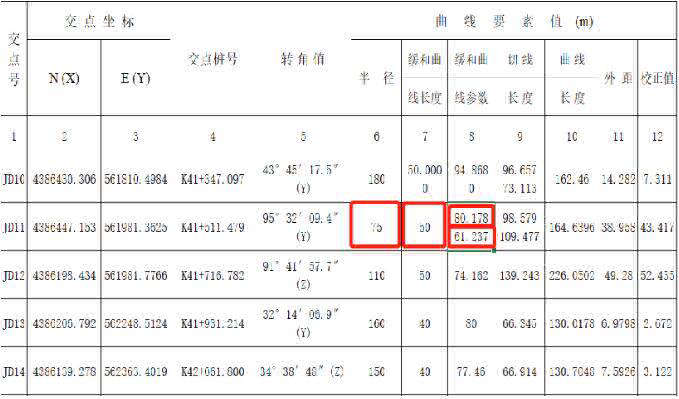
卵形曲线:以下图交叉点11为例,第一缓和曲线:80.178²≠75*50,所以第一缓和曲线为不完全缓和曲线,而交叉点11的第一缓和曲线是在交叉点10的圆曲线后面,所以交叉点11的第一缓和曲线半径由"180→75"确定,即输入交叉点11时,需要在第一缓和曲线起始半径处输入180,如果没有给出180,也可以通过公式(R1-R)*A²/(R1*R)=L计算得到(R1是第一缓和曲线起始半径或者第二缓和曲线终点半径)。因为第二缓和曲线61.237²=75*50,所以第二缓和曲线是完全缓和曲线,半径由"75→∞"确定,即第二缓和曲线终点半径可以默认不输入或者选择∞。
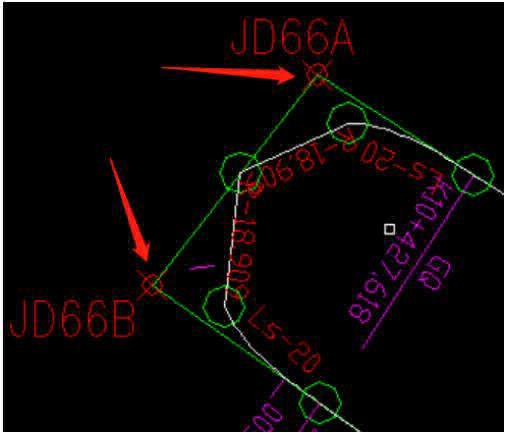
虚交点输入:
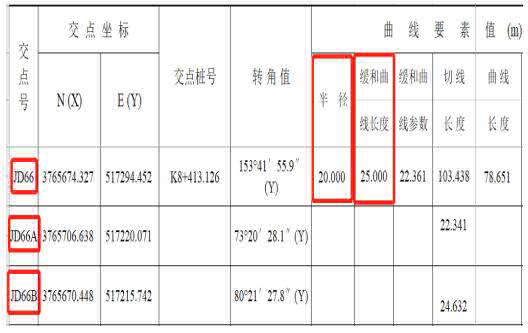
如下图:由于该段线路的前后旋转角度超过了180°,导致交叉点66位于右下方,这种交叉点称为虚交点,因此需要将交叉点66分解为交叉点66A和交叉点66B。对于虚交点,在使用交叉点法进行输入时,不需要输入交叉点66,而是需要输入交叉点66A的坐标、半径、第一和第二缓和曲线长度,然后输入交叉点66B的坐标、半径为-1,不需要输入缓和曲线长度。

莱佳德科技提供测绘仪器以旧换新,测绘仪器维修,测绘仪器代检,全站仪租赁销售,无人机 无人船、三维扫描仪、工程测量业务承接。 需要购买全站仪、GPS/RTK/GNSS接收机、无人机、无人船 、水下无人机、水准仪、经纬仪、管道探测等测绘仪器设备,或有测绘仪器相关问题及测绘工程类的业务可以联系莱佳德科技(leicado.com)。
版权说明|莱佳德科技南京有限公司尊重原创,图片和文章的版权为原作者所有,若有侵权请联系本单位,我们会及时声明或删除。



