

- 客服极速应答
- 30min答复
- 免费定制方案
RIEGL VZ-400i
RIEGL VZ-400i 是一款先进的三维激光扫描系统,采用了能与互联网进行交互的全新处理框架,并且结合了RIEGL全新的LiDAR波形处理技术。
RIEGLVZ-400i三维激光扫描系统结合了新创的数据处理技术、互联网接入、MEMS传感器和 RIEGL新的扫描技术。VZ-400i可以在扫描过程中实时处理数据,这是通过两个处理平台实现的:一个是融合了系统操作、点云数据和影像数据同步采集和在线波形处理的专用处理系统;另一个处理平台能够自主地并行进行匹配点云、赋予坐标、过滤数据及分析数据等操作。VZ-400i在内部集成了3G/4G 调制解调器、WiFi和以太网通信硬件。VZ-400i内置了惯导系统(MEMSIMU,指南针和气压计)并拥有高达1200 kHz的脉冲重复频率,而且可外接第三方设备或配件(设有USB端口和安装点),这些特点大大降低了它的使用限制。
应用领域:
- 竣工测量
- 建筑与门面测量
- 考古与文化遗产文献
- 建设基础设施管理(BIM)
- 取证和事故现场调查
- 城市建模
- 隧道测量
- 土木工程
- 林业
- 研究
- 监控
相机选项
高精度的安装支架为高分辨率单反相机的集成提供了保障,仅使用两个螺丝就可以将相机安装到扫描仪顶部,而支架上的三个支撑点则固定了相机的位置和方向。相机通过扫描仪供电,拍摄的照片通过USB 接口直接存储至扫描仪内部。相机和扫描仪的数据在软件中可叠加在一起,生成逼真的三维点云数据。该数据分细节充分,具有非常高的精度并可量测,可用于场景虚拟重建等。新的 400i 可以在扫描过程中同时获取图像,大大减少了每站的扫描时间。
轻型碳纤维三脚架
RIEGL提供轻型碳纤维三脚架,可在快速简便的扫描作业中使用。

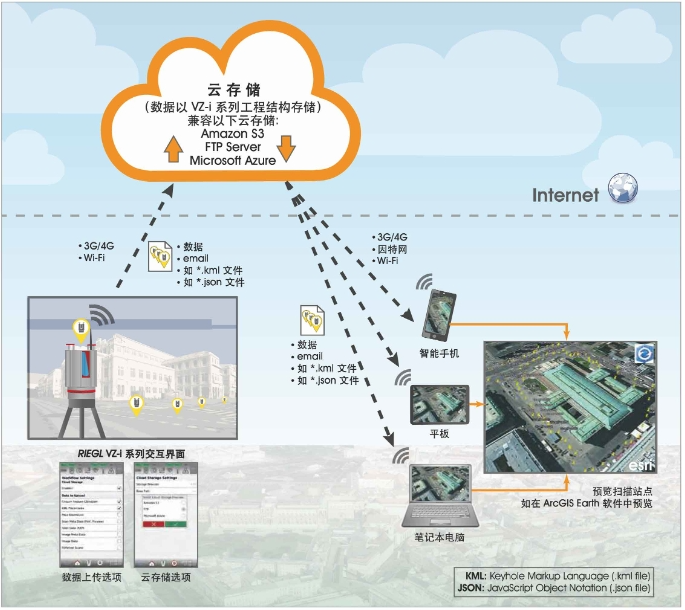
RIEGL VZ-i系列设备可将数据通过互联网、3G/4G 或 Wi-Fi 网络传输至云存储。用户可以自己选择云端存储提供商或 FTP 服务器,自己设置需要上传到云存储或下载的内容。在每站完成扫描后,用户设置的扫描数据会被传输到云存储中。支持的云存储目前包括 AmazonS3和 Microsoft Azure。
RI/EGL 先进的 LiDAR 技术为高度信息化的扫描数据奠定了基础。接收的回波信号中除了距离信息之外还额外包含一些属性信息,在后处理软件中利用这些属性信息可以显著改善点云的质量。
多目标识别能力-高透射能力的基础
VZ-400i的测距利用了飞行时间差的方法,它可以获取每个激光脉冲所能接触到的所有目标的距离。根据测量模式的不同,可以测量到的目标数目也会有所不同。
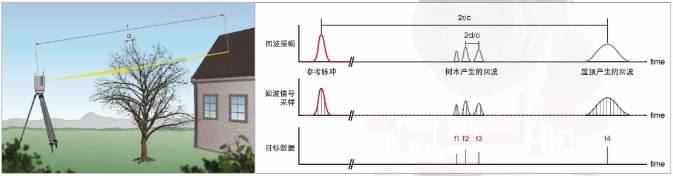
脉冲形状偏差输出
回波信号中的波形信息可以在处理两个目标因为太近而在回波中无法区分的情况时使用。对波形信息使用阀值进行简单过滤就可以过滤掉大多数“无效”点并保留可信度较高的“真实”目标点。

经过校准的反射率信息
该功能可使扫描的点云基于反射率(其值与距离设备远近无关)信息显示,以便更好地进行数据分类。
 技术参数
技术参数












 点击咨询客服
点击咨询客服
 点击咨询客服
点击咨询客服