

- 客服极速应答
- 30min答复
- 免费定制方案
纵横大鹏CW-30
 CW-30大鹏为双尾撑布局、后推式油动垂直起降固定翼无人机,专为大面积任务范围设计的无人机飞行平台。采用多旋翼与双尾撑固定翼相结合的方式,兼具航时长、速度快、载荷大、结构稳定、可靠性高等特点。CW-30主要应用于大面积、高效率、长航时的飞行任务,尤其适用于每次飞行面积在150平方公里内的项目。
CW-30大鹏为双尾撑布局、后推式油动垂直起降固定翼无人机,专为大面积任务范围设计的无人机飞行平台。采用多旋翼与双尾撑固定翼相结合的方式,兼具航时长、速度快、载荷大、结构稳定、可靠性高等特点。CW-30主要应用于大面积、高效率、长航时的飞行任务,尤其适用于每次飞行面积在150平方公里内的项目。
多元化任务舱
350*300*230任务舱,任务载荷能力更强,除常见的单反相机外,还能够搭载激光雷达、专业航摄仪、多拼相机、光电吊舱以及高光谱成像设备,服务更多的行业领域!
CW-30
结构稳定,大载重长航时无人机平台,任务载荷能力强,可搭载激光雷达、专业航摄仪、多拼相机、光电吊舱以及合成孔径雷达等设备,服务更多的行业领域。
 |  |  |
| 雨雪天气 | 移动起降 | 移动起降 |
技术数据
| 硬件 | 机身长度 | 2.1m |
| 翼展 | 4.0m | |
| 起飞重量 | 35kg | |
| 化油器发动机 | 80cc | |
| 无线电链路范围 | 50km / 100km(可选) | |
| DGPS | RTK/PPK | |
| 模块化设计 | 是 | |
| 一机多用 | 一机多用任务舱设计,可根据任务需求,实时更换任务设备 | |
| 携带箱尺寸 | 1480×650×700mm | |
| 配件 | 遥控器 | JOUAV®TC-101遥控器; 专为纵横大鹏®CW系列量身打造,1000米遥控距离,内置电池续航时间大于6小时 |
| 有效负载 | 任务载荷 | 3~6kg |
| 影像传感器 | IXU-RS1000 / IXM-100 中画幅工业相机; 可提供高质量的航空成像和灵活的操作,以满足各种测绘、测量和检测应用 | |
| 双光吊舱 | MG-200S 双光吊舱 | |
| 激光雷达 | CW-30LiDAR 激光雷达系统 | |
| 五镜头影像传感器 | 全画幅五镜头倾斜摄影相机 | |
| 合成孔径雷达 | MiniSAR 合成孔径雷达系统 | |
| 飞行 | 续航时间 | 180~360分钟 |
| 巡航速度 | 100km/h | |
| 抗风能力 | 7级 | |
| 实用升限 | 4500m | |
| 起飞海拔 | 3800m | |
| 起降方式 | 垂直起降 | |
| 垂直方向定位精度 | 3cm | |
| 水平方向定位精度 | 1cm+1ppm | |
| 软件 | 地面站软件 | CWCommander |
负载数据
MG-200S
MG-200S光电吊舱是JOUAV®自行研制的轻型光电吊舱载荷。该光电吊舱搭载了先进的30 倍无损光学变焦光学机芯和红外热像机芯,可对目标区域执行昼夜侦察和监视任务。
赋予全新生命力
自带高性能图形处理器,使用Nivida Jetson模块具备很高的性能和能效,可以运行现代 AI工作负载,并行运行多个神经网络,以及同时处理来自多个高清传感器的数据。
 |  |  |
| 赋予全新生命力 | 目标位置定位解算 | 目标图像跟踪 |
| 具备对视轴进行自动稳定的能力(两轴),保持画面的稳定。提高目标观察侦查效果,并可实时对目标进行拍照取证。 | 视频画面OSD 叠加无人机与目标坐标信息、系统状态信息,辅助操纵人员掌握态势,提高现场综合决策能力。 | 机载AI 辅助功能,实现对特定目标类型(例如车辆、船舶、建筑物等)的持续识别、标注、框选和追踪。 |
稳定的双传感器吊舱系统
除基础高精度自动飞行和双光视频实时回传之外,还具备多种电子增强处理、AI 目标识别定位和自动跟踪与引导飞行能力,以及预设线路与区域自动搜索功能。
实现对目标区域的昼夜监控
搭载非制冷焦平面热成像传感器,热像仪焦距 25 mm,拥有夜间目标侦测能力。通过热成像与可见光融合,无论白天黑夜,均能实现目标区域的实时监控,并可通过目标影像特征或目标锁表锁定目标并自动追踪。
| 主要规格 | 稳定平台类型 | 两轴两框架双光光电吊舱 |
| 收缩机构 | 配置具有轻型收缩机构以及匹配的减震器 | |
| 方位范围 | N×360°(方位不受限) | |
| 俯仰范围 | -130°至+90° | |
| 跟踪角速率 | ≥60°/s | |
| 可见光 | 像元数 | 1920×1080 |
| 变焦 | 30 倍光学变焦,12 倍数字变焦 | |
| 红外 | 热像仪类型 | 氧化钒非制冷平面 |
| 像元数 | 640×480 | |
| 热像仪光谱 | 8um至12um | |
| 焦距 | 25mm | |
| 记录 | 视频格式 | H.264 编码 TS. 封装 |
| 支持 | 设备支持 | CW-10 / CW-15 / CW-25 / CW-30 / CW-100 |
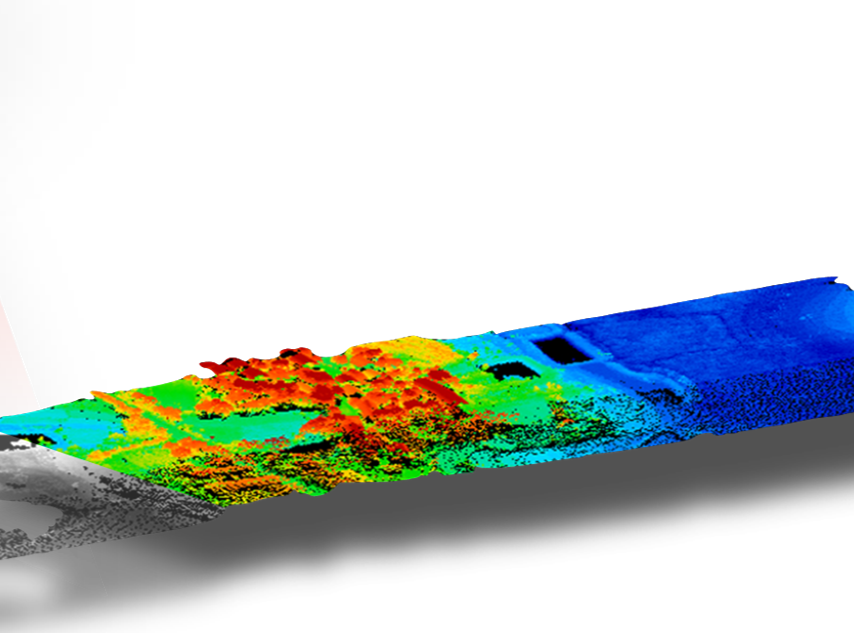
JoLiDAR
JoLiDAR系列产品是JOUAV®自主研发的激光雷达扫描系统,具有短距离测量、长距离测量等多款激光雷达产品。集成了激光扫描仪、GNSS高精度定位系统、惯性导航系统、全画幅相机、时间同步系统、数据存储系统等。整体集成度高、一体化控制、高精度配置、实时显示控制;支持无基准站、大测区、全域免像控功能;支持多卫星导航系统RTK+IMU松耦合、紧耦合方式,支持后处理功能、可快速生成高精度原始点云数据与真彩色点云。
LiDAR如何运作?
激光雷达系统主要包括雷达系统搭载平台、激光扫描仪、GNSS高精度定位系统、惯性导航系统、全画幅相机、时间同步系统、数据存储系统等。激光扫描仪用于测量发射点与地表反射物之间的相对距离,GNSS定位系统用于确定激光雷达发射点的空间位置,惯性导航系统用于测量激光雷达系统的姿态角度,时间同步系统将激光扫描仪、GNSS高精度定位系统、惯性导航系统统一到同一时间基准下。采集作业完成后,将激光雷达系统采集的原始数据经过软件融合处理后,即可得到高精度的三维点云数据和正射影像。
主要应用
与传统测绘技术相比, JoLiDAR完善的解决方案能使您快速获取、制作测区的成果数据。JoLiDA系统广泛应用于基础地形测绘、公路设计勘测、水库建设地形测量、高铁线路规划、应急灾害测量、电力巡检与自动驾驶、矿山测量等领域。
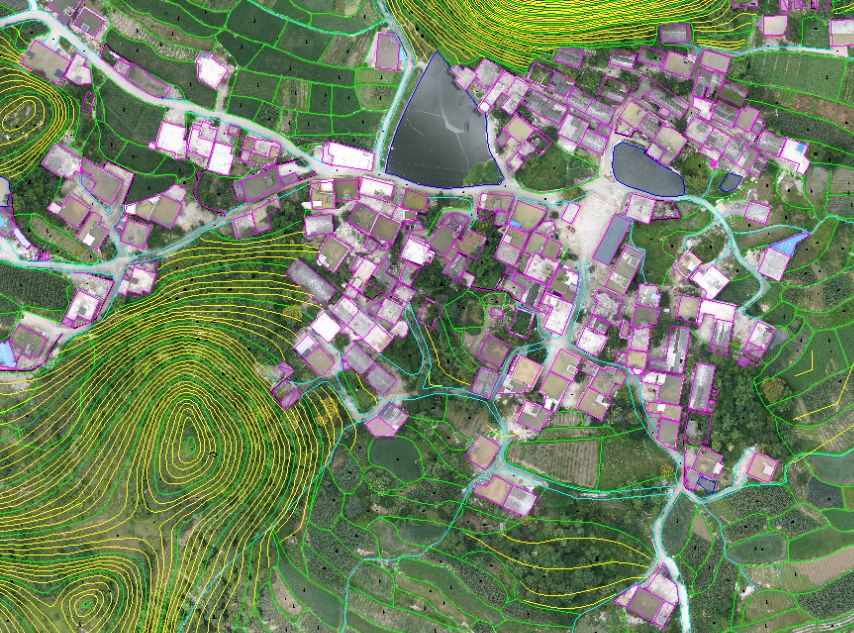 |  | 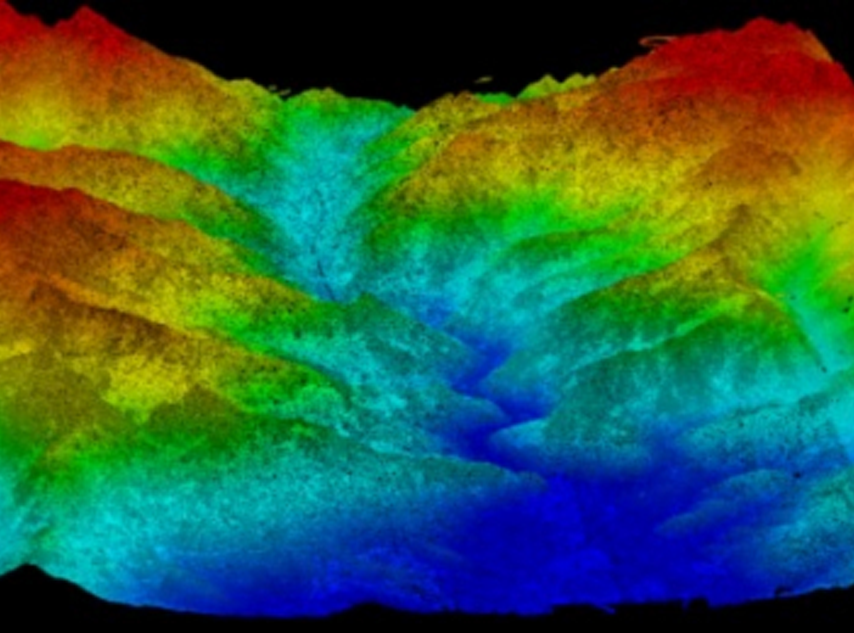 |
| 基础地形测绘 | 公路设计勘测 | 水库地形测量 |
| 效率高、精度高,能快速地得到测区的DEM、DLG等成果数据。 | 利用多回波技术,获取茂密树林下的地表点,提供公路基础地形数据。 | 地形复杂,采集水库区域的地形数据,制作DEM、DLG等成果数据。 |
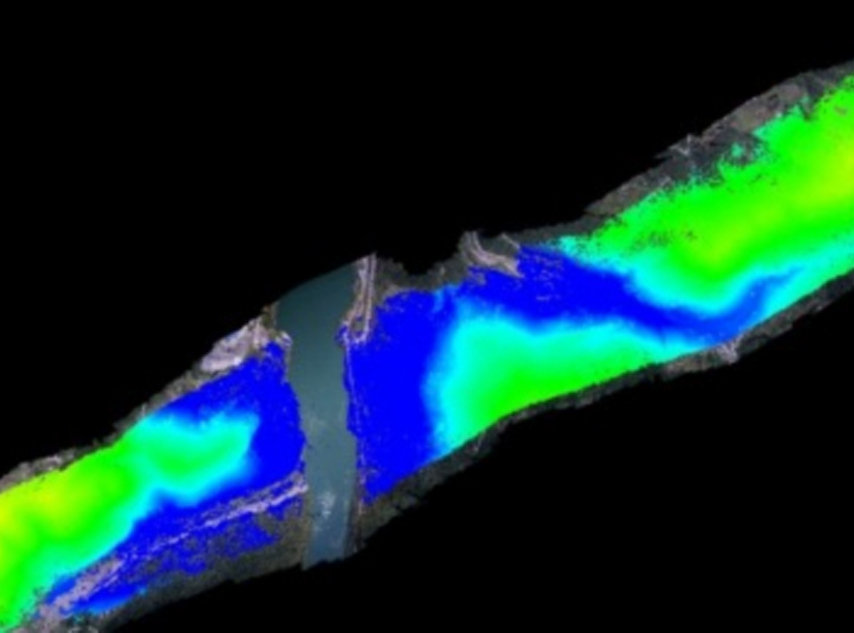 |  | 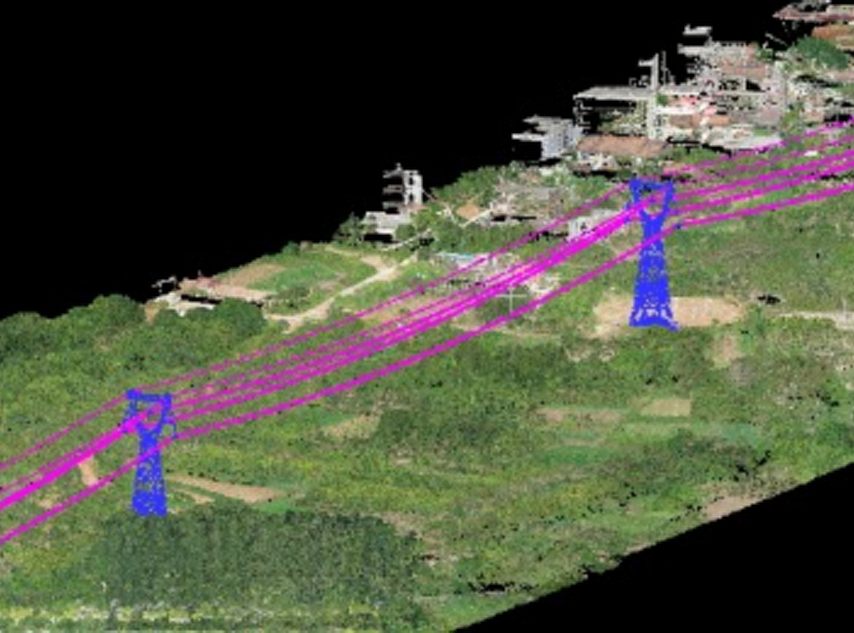 |
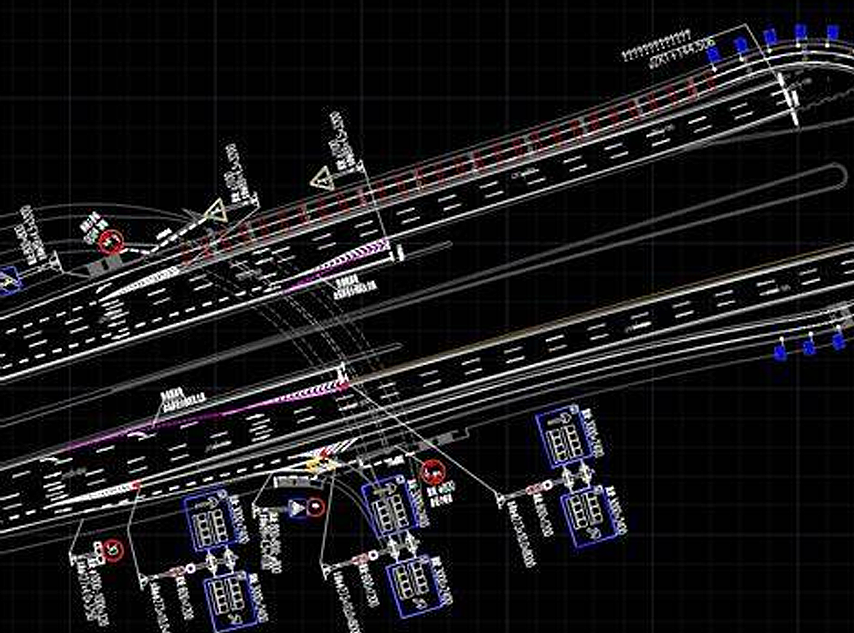
| 高铁线路规划 | 应急灾害测量 | 电力巡检与自动驾驶 |
| 快速获取线路周边的地形数据,为线路规划设计提供基础数据。 | 获取灾害位置的地形数据,为应急救灾部门提供受灾区域地形情况。 | 通过点云,计算电力线与植被间的危险点,并建立高精度电力走廊。 |










 点击咨询客服
点击咨询客服
 点击咨询客服
点击咨询客服