
全站仪后方交会原理及注意事项详解
全站仪后方交会操作步骤
目前全站仪已经逐渐普及,利用全站仪可以方便的同时测量角度和边缘。因此,在实际工作中,存在着边测、角测、角测后交会坐标的计算及其精度评定等问题。
在工程测量中,后方交会是测量定位、控制网加密和自由设站施工放样的重要方法之一。传统的后方交会以角度测量为主。随着电子测距仪在生产中的广泛应用,距离后方交会定位方法得到越来越多的应用。例如,隧道工程控制网往往在隧道开工前就已测设完成,但在隧道洞口土方施工完成后,需要在隧道洞口增设控制隧道轴线的点位,点位布设会采用后方交会法。该方法还可应用于深水桥墩放样测量中墩中心的定位,也可用于测量施工控制导线的始终点。
目前全站仪已经逐渐普及,利用全站仪可以方便的同时测量角度和边缘。因此,在实际工作中,存在着边测、角测、角测后交会坐标的计算及其精度评定等问题。
全站仪后方交会原理
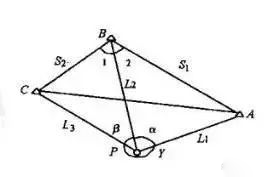
如图,P点是后方交会点,ABC是控制网中的已知点。通过测量边长L1、L2和L3,角度α、β和γ,可以应用解析公式计算点P的坐标。
 前方交会法和后方交会法
前方交会法和后方交会法
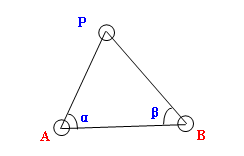
前方交会:通过测量两个(或多个)已知点(A,B)上的α角和β角,计算待测点(P)坐标的方法。如下图所示,用红色字母表示的站是机架站(A,B):
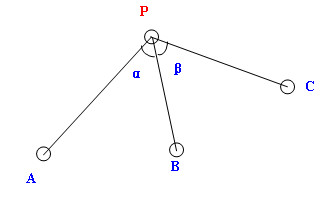
 后方交会法:在待测点(P)设站,利用三个已知点(A、B、C)和角度α、β计算待测点(P)坐标的方法。如下图所示,红色字母代表的工位是机架工位(P):
后方交会法:在待测点(P)设站,利用三个已知点(A、B、C)和角度α、β计算待测点(P)坐标的方法。如下图所示,红色字母代表的工位是机架工位(P):
 后方交会操作步骤
后方交会操作步骤
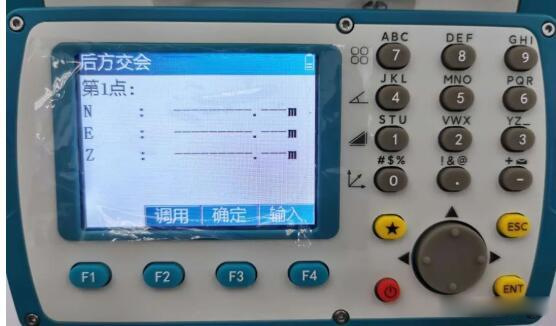
在新站上安装仪器,用最多5个已知点的坐标和这些点的测量数据计算新坐标。后方交会观测如下:
距离测量后方交会:测量2个或2个以上已知点。
角度测量后方交会:测3个或3个以上已知点。
进入放样菜单P2,按数字键[2](后方交会法);
输入新的点名点、代码和仪器高度。按下[F4](确认)键;
按[F1](输入),输入已知点A的点号(此处也可调用),按[F4](确认);
如果文件中不存在该点,按【F4】(确认)会提示:点名不存在。这时,可以直接输入该点的坐标,按[F3](坐标),输入后按[F4]确认。[确认] →如果文件中存在点名,按[F4](确认)键。
按【F4】(确认)屏幕提示输入目标高,输入完毕后按【F4】(确认)键;
瞄准已知点A,按[F3](角度)或[F4](距离)。例如,按[F4](距离)键;
启动测量功能;
7)进入已知点B的输入显示。
8)按步骤5)- 8)步骤测量已知点B,用“距离”测量两个已知点后会计算出残差;
按[F1]测量其他已知点,最多5个已知点;
按[F4](计算)键查看后方交会的结果,并显示坐标值的标准差。
按[F4](坐标)显示新点的坐标。按[F4](是)记录数据。
新点坐标存储在坐标文件中,并将用作测量站的坐标。
 后方交会测量中的注意事项
后方交会测量中的注意事项
当被测站与已知点位于同一圆上时,在某些情况下无法确定被测站的坐标。
当已知点位于同一圆上时,可采取以下措施:
(1)将测量站尽可能设置在由已知点组成的三角形的圆周上。
(2)添加一个不在圆周上的已知点。
(3)测量至少一个已知点的距离。
当已知点之间的距离一定时,测站与已知点之间的距离越远,夹角就越小,已知点就容易位于同一圆上。如果已知点之间的角度太小,则无法计算测站的坐标。
如何获得更精准的坐标?
1.角度、侧面的关系,距离要大致相等最好不要太近,角度最好在30°到120°之间;
2.适当增加观察次数。无论是距离交会还是角度交会,条件越充分,精度就会越高。推荐8个点的自由建站;
3.检查仪器的精度是否能达到标称精度,并定期维护仪器;
4.格网因子改为1。
需要购买全站仪、GPS-RTK、水准仪、经纬仪等测绘仪器,或有测绘仪器相关问题可以联系莱佳德科技。
版权说明|莱佳德科技南京有限公司尊重原创,图片和文章的版权为原作者所有,若有侵权请联系本单位,我们会及时声明或删除。



