
大比例尺地形图测绘中使用RTK、三维激光扫描仪和无人机倾斜摄影的对比分析(2)
大比例尺地形图测绘中使用RTK、三维激光扫描仪和无人机倾斜摄影实验2
研究结果表明:大场景的地形图测绘,采用RTK进行单点测图测量精度受地理环境因素影响较大、效率较低,但成本较低。采用三维激光扫描和无人机进行测图测量精度受地理环境因素影响较小、效较高,但成本较高。
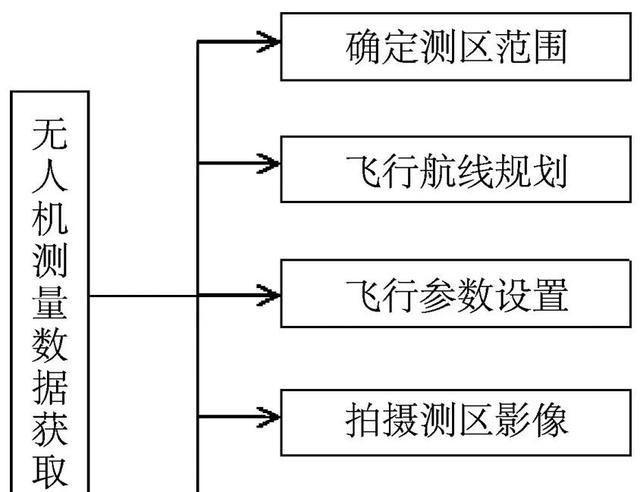
2.3无人机数据采集
3数据处理
3.1RTK数据处理
RTK数据处理使用CASS9.1软件,主要针对RTK与全站仪采集的野外数据绘制地形图。由于地形图是采用两种仪器进行测绘的,因此在绘制地形图前,需要将野外采集的数据合并且转换格式为CASS9.1软件可导入的格式(点名、X、Y、Z转为点名、Y、X、Z)。然后导入到CASS9.1软件中,野外测点点号,根据野外草图或野外测点名绘制地形图。该方法的测量精度受地理环境因素影响较大,效率较低。RTK数据处理的主要流程如图5所示。
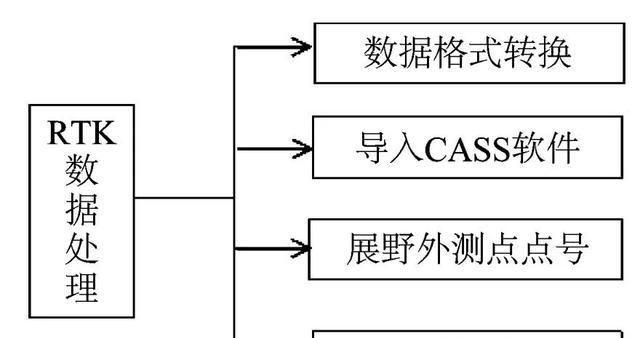
图5:RTK数据处理 流程
3.2地面三维激光扫描数据处理
处理三维激光扫描数据使用Riscanpro1.6.4和EPS2016三维测图软件,Riscanpro1.6.4软件主要是把野外采集的三维激光点云数据进行配准、去噪,EPS2016根据处理后的三维激光点云模型进行三维测图。首先,在数据处理之前,需要将三维激光点云的格式转换为可导入到Riscanpro1.6.4软件中的格式。此外,在三维激光点云数据配准前,需要将扫描的49个测站数据依次导入Riscanpro1.6.4中进行压缩,以便快速配准。配准是根据采集的控制点转换扫描的数据坐标系,将扫描坐标系转换为工程坐标系。转换坐标系主要计算七参数(3个平移参数、3个旋转参数和1个缩放参数)。然后将配准完的激光点云数据去噪,保留对三维测图有价值的三维激光点云数据。最后,将处理完的测区范围导入EPS2016软件中绘制地形图,此方法受地理环境影响因素较小、效率比较高。三维激光扫描仪数据处理的主要流程如图6所示。
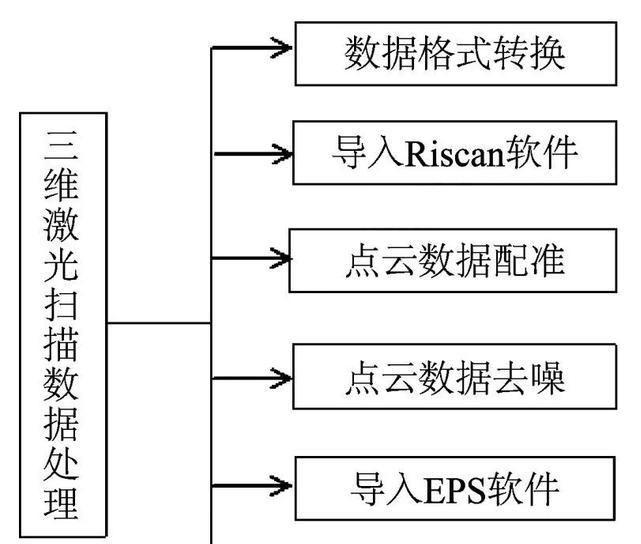
图6:三维激光扫描数据处理流程
3.3无人机数据处理
无人机数据处理使用Smart3D4.4.9和EPS2016三维测图软件,Smart3D软件是将采集到的无人机影像数据进行测区正射影像和三维实景模型的构建,EPS2016三维测图软件是基于测区正射影像和三维实景模型进行三维测图。首先,无人机图像处理前,需要对野外采集的图像数据进行筛选,删除过度曝光、模糊和重复的图像,否则会导致Smart3D软件处理失败。然后将采集到的像控点刺在无人机图像上,进行空中三角测量处理,由于DJ Phantom4 RTK采集的pos数据会自动写入图像,因此在进行空中三角测量处理时,无需导入pos数据,刺完像控点后进行空中三角测量处理即可。此外,根据工程需要,在Smart3D中设置参数后,软件会自动构建测区的正射影像和三维实景模型。最后在EPS2016三维测图软件中根据二维正射影像和三维实景模型实现二三维联动绘制地形图。此方法的测量精度受地理环境因素影响较小,效率比较高。无人机处理数据的主要过程如图7所示。
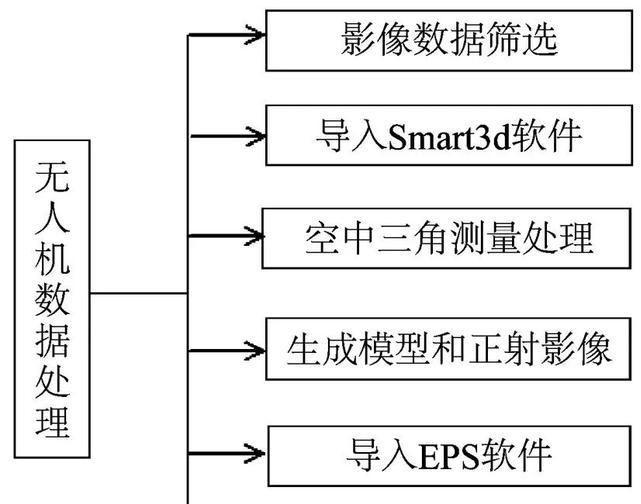
图7:无人机数据处理流程
版权说明|莱佳德科技南京有限公司尊重原创,图片和文章的版权为原作者所有,若有侵权请联系本单位,我们会及时声明或删除。



