

- 客服极速应答
- 30min答复
- 免费定制方案
SLAM100
SLAM100是飞马机器人推出的手持移动式激光雷达扫描仪。该系统具有360°旋转云台,可形成270°×360°点云覆盖,结合行业级SLAM算法,可在无光照、无GPS情况下获取周围环境高精度、高精细度的三维点云数据。
| 激光视场角 | 精度 |
| 270°×360° | 5cm |
| 点频 | 测距 |
| 320kpts/s | 120m |
| 相机分辨率 | |
| 3×500万pxs |
270°x360激光视场角
旋转式扫描,激光传感器动态采集形成270°x360°球形视场角,精准采集各角落数据,保障数据完整性。
成果图
SLAM100旋转式扫描,顶部和底部数据均匀,角落数据完整。

搭配可见光相机
选用三颗500万像素摄像头,形成水平200°、垂直100°视场角,可同步获取纹理信息,生成彩色点云和局部全景图。
高精度、高精细度
行业级SLAM后处理算法,使得SLAM100可以获取更高精度、更加精细的三维点云数据。
控制点自动采集
无需手动添加控制点,主动式采集和自动化提取,可以轻松将成果数据放置在全局坐标系中。
飞行平台挂载
可支持挂载在飞马D500和D20飞行平台上,进行空地一体化、室内外一体化数据采集。
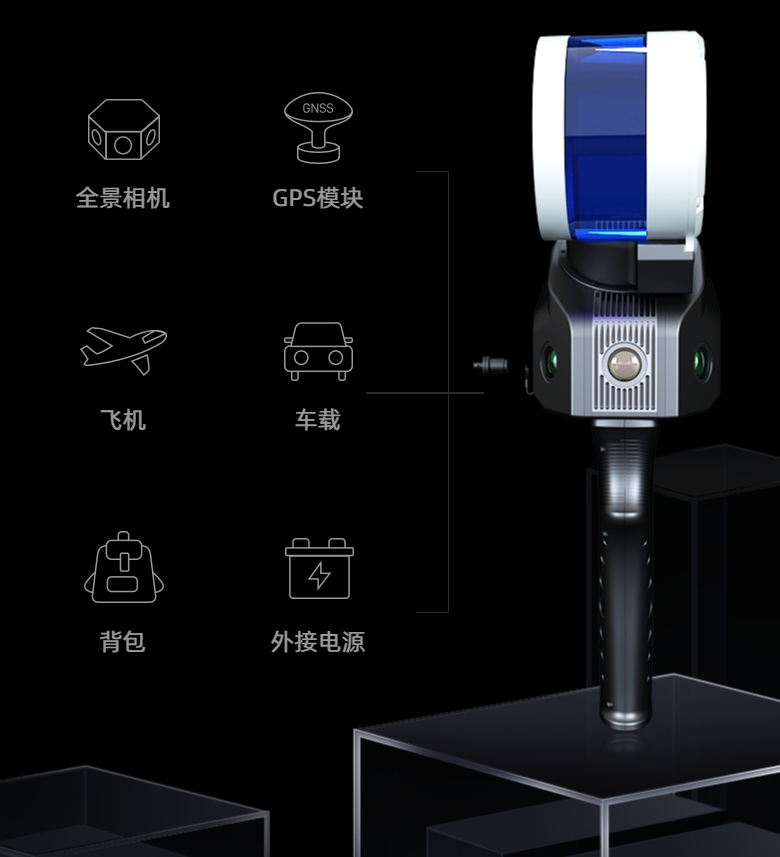
丰富的外部接口
可外接全景相机、GPS模块等,使数据采集多样化,以适用更多的应用场景。
SLAM GO APP
无线连接SLAM100,实时显示扫描数据,可进行2D、3D及切片显示; 手机APP历史工程信息云端同步; 预览三颗摄像头获取影像。
SLAM GO POST
作为与SLAM100配套的PC端软件,内嵌在无人机管家专业版中。该软件可进行SLAM100采集数据的后处理,生产高精度、高精细度彩色点云,生产局部全景图,可进行点云浏览和优化处理。
应用场景
地形测绘 、房产测绘 、数字化管理 、方量计算 、古建筑保护 、地下空间 、逆向工程 、容积测量 、竣工测量 、溶洞、巷道 、林业调查 、立面测量
技术参数
整体参数
| 激光视场角 | 270° × 360° | 相机视场角 | 200°(水平)×100°(竖直) |
| 相对精度 | 2cm | 精度 | 5cm |
| 存储容量 | 32GB(标配) | 供电方式 | 内部可更换锂电池、外部供电 |
| 外部供电电压 | 20-30V | 内部电池 | 3350mAh × 4 |
| 內部电池续航 | 2.5h | 功耗 | 25W |
| 工作温度 | -10°C~ + 45°C | 工作湿度 | <85%RH |
| 重量 | 1588g(不含电池) | 尺寸 | 372mmx163mmx106mm(不含底座) |
传感器参数
| 激光等级 | Class1 | 激光通道数 | 16 |
| 测距 | 120m | 点频 | 320kpts/s |
| 回波强度 | 8bits | 相机数量 | 3 |
| 相机分辨率 | 500w |






 点击咨询客服
点击咨询客服
 点击咨询客服
点击咨询客服