

- 客服极速应答
- 30min答复
- 免费定制方案
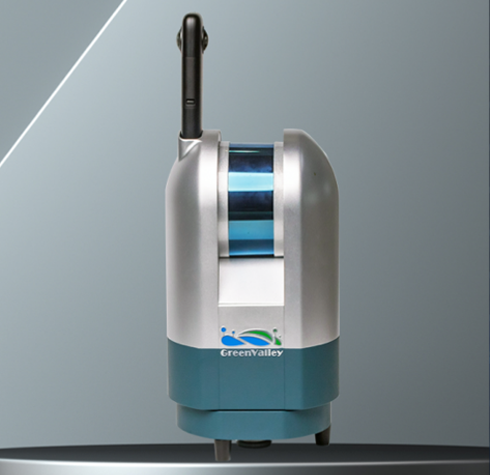
LiBackpack C50背包激光雷达扫描系统
LiBackpack C50背包激光雷达扫描系统是LiBackpack 50产品系列的相机版本,通过配置一个360°的全景相机,在获取高精度三维点云数据时,同步地获取影像数据。
免费联系电话
13770523955
LiBackpack C50背包激光雷达扫描系统是LiBackpack 50产品系列的相机版本,通过配置一个360°的全景相机,在获取高精度三维点云数据时,同步地获取影像数据。借助于影像,可辅助激光点云数据用于室内外一体化测量、地下空间信息获取、隧道工程、数字工厂、数字矿山、林业资源普查、 BIM、建筑立面测量等领域。
易操作
自动化程度高,开机即用,处理操作简单,采集完成后可通过LiBackpack处理操作软件快速生成彩色点云数据和对应全景影像。
简洁方便
数据在手机、平板等移动端实时显示;支持无线/有线方式查看数据;数据传输稳定性强,边采集边查看。
高精度
结合激光雷达和SLAM算法实现室内外一体化测量,无需GNSS信号即可实现厘米级数据精度。
高效率
实时显示高精度点云数据、支持在线闭环以及闭环优化,扫描完成即可导出采集点云数据和运动轨迹。
设计轻巧
可搭载不同的移动平台,无论是手持、步行、骑行、车载都可以轻松采集数据。
低成本
无需GPS,成本大幅度降低。
| 系统参数 | ||||||
| 重量(含相机) | 7.1kg | 尺寸 | 770*320*190mm | |||
| 相对精度 | 3cm | 绝对精度 | 控制点约束 | |||
| 扫描频率(单回波) | 300000 点 / 秒 | 功耗 | 40W | |||
| 作业方式 | ||||||
| 作业方式 | 背负作业 + 手持作业 | |||||
| 激光器 | ||||||
| 激光器个数 | 1 | 扫描方式 | 16 线重复扫描 | |||
| 测距 | 100m @ 20%反射率 | 视场角 | 垂直:30°(-15° ~15°) 水平:360° | |||
| 回波数 | 2 | |||||
| 相机 | ||||||
| 分辨率 | 3840*1920 | 帧率 | 30 帧 | |||
| 视场角 | 360° | 像素 | 1800W | |||
*受采集环境和路径规划影响。
相关推荐








 点击咨询客服
点击咨询客服
 点击咨询客服
点击咨询客服